Микроскопические роботы, которые могут передвигаться внутри нашего организма уже давно перестали быть чем-то невероятным и, скорее всего, рано или поздно найдут свое применение в медицине. Но интересным остается другое: все существующие на сегодняшний момент роботы имеют в своей основе самые разные технологии перемещения.
И недавно специалисты из Эксетерского университета (Великобритания) представили одну из, пожалуй, самых интересных. Она основана на создании роботов с ферромагнитной головкой.Как сообщает редакция журнала Physics of Fluids, робот состоит из двух основных частей: уже упомянутой ферромагнитной головки и гибкого подвижного жгуитика на другом конце. Исследуются динамические характеристики робота-пловца на границе раздела фаз воздух-жидкость в зависимости от частоты и амплитуды внешнего магнитного поля удалось установить, что скоростью миниатюрного робота можно управлять, используя магнитное поле с частотой менее 3,5 микротесла. При этом, изменяя длину жгутика, удалось добиться того, что можно четко контролировать перемещение робота, заставляя двигаться в требуемую сторону.
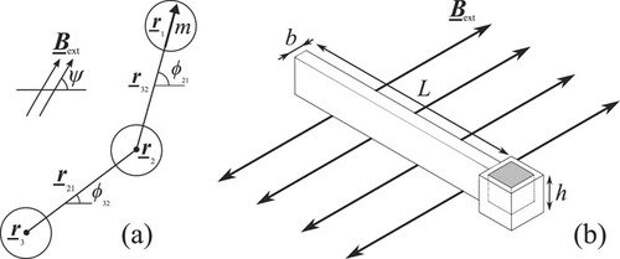
Геометрическая конфигурация модели робота (а) и схематичное изображение ферромагнитной частицы (b)
Само устройство робота довольно просто: на одном конце расположена головка из ферромагнитного материала, имеющего в своем составе неодим, железо и бор. Кристаллическая решетка вещества имеет тетрагональную форму и позволяет ему иметь хорошие ферромагнитные свойства. Головка выполнена в форме куба с гранью равной 0,5 миллиметра.
На другом конце микробота располагается подвижный жгутик (или хвост).Перемещение робота было позаимствовано у самой природы. Жгуик одноклеточных и некоторых клеток животных (например, сперматозоидов), двигаясь, создает завихрения потоков жидкости, что и позволяет двигаться. Жгутик робота делает то же самое.
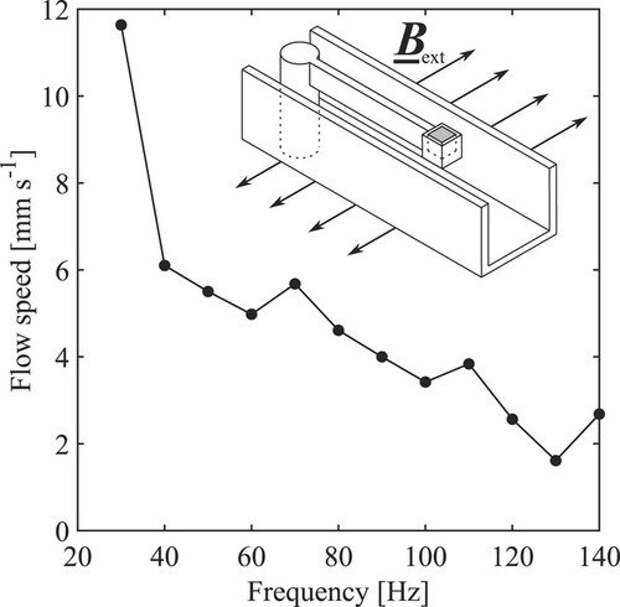
Измерение скорости потока жидкости в зависимости от частоты. Тут показано схематическое изображение робота с ферромагнитной частицей в качестве насоса
О сфере применения робота создатели пока не говорят, замечая, что используя его в медицинской практике можно добиться потрясающих результатов. Например, применив таргетную доставку лекарственных средств или же в качестве устройства диагностики заболеваний и мониторинга за состоянием здоровья.
Свежие комментарии